Tra pochi giorni ci sarà l’evento dell’anno, aspettato con trepidazione da molti appassionati di esplorazione spaziale: l’arrivo su Marte del Mars Science Laboratory, ribattezzato più amichevolmente “Curiosity”. data prevista per lo sbarco il prossimo 6 Agosto.
da un po di tempo la NASA, ci permettedi sapere in tempo reale dove si trova Curiosity, con la possibilità di vederlo in due schermate , una riproducendo l'immagine dell' orbita di Curiosity in confronto alle orbite e posizioni dei pianeti del sistema solare , l'altra partendo dal punto di vista della sonda stessa, nel sistema solare.
Grandi aspettative, ma anche nuove applicazioni, Ingegneristiche, Strumentali, e di Tecniche Aerospaziali , sono il frutto di questo nuovo progetto, e di questa nuova missione, che e' ormai giunta alla terza generazione di Rover inviati sul pianeta Marte.

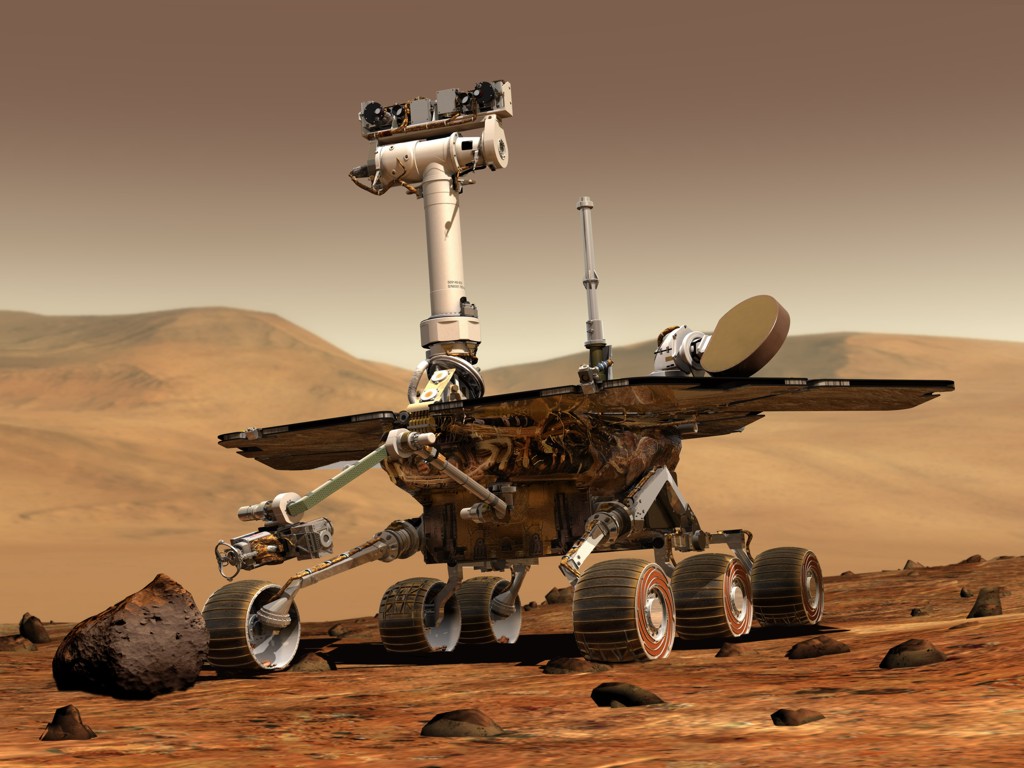
Un rover marziano
Prima di vedere nel dettaglio cosa sia Curiosity , ripercorriamo un po la storia delle Missioni spaziali inviate sul Piane Rosso, che sono costellate da enormi insuccessi , tanto da affibbiare al piante rosso l'appellativo di Maledetto!
Sono un certo numero, si parte dal lontanissimo 1960 con la Marsnik 1 (USSR) fino ad arrivare al lancio di Curiosity (USA) dello scorso 26 Novembre 2011.
Ve le proponiamo una dopo l'altra, con una brevissima nota descrittiva:
Iniziamo dalla prima, tornando indietro nel tempo fino all'Ottobre 1960.
Marsnik 1: USSR, lancio il 10/10/1960, Mars flyby, mancato raggiungimento dell’orbita Terrestre.
Marsnik 2: USSR, lancio il 14/10/1960, Mars flyby, mancato raggiungimento dell’orbita Terrestre.
Sputnik 22: USSR, lancio il 24/10/1962, Mars flyby, raggiunta solamente l’orbita Terrestre.
Mars 1: USSR, lancio il 1/11/1962, Mars flyby, la radio si è guastata a 106 milioni di Km dalla Terra.
Sputnik 24: USSR, lancio il 4/11/1962, Mars flyby, raggiunta solamente l’orbita Terrestre.
Mariner 3: USA, lancio il 5/11/1964, Mars flyby, mancata espulsione della copertura.
Mariner 4: USA, lancio il 28/11/1964, primo Mars flyby compito con successo il 14/7/65. Ricevute 21 foto.
Zond 2: USSR, lancio il 30/11/1964, Mars flyby, superato Marte ma un fallimento della radio non ha consentito di ricevere alcun dato.
Mariner 6: USA, lancio il 24/2/1969, Mars flyby 31/7/69, Ricevute 75 foto.
Mariner 7: USA, lancio il 27/3/1969, Mars flyby 5/8/69, Ricevute 126 foto.
Mars 1969A: USSR, lancio il 27/3/1969, Mars orbiter, mancato raggiungimento dell’orbita Terrestre.
Mars 1969B: USSR, lancio il 2/4/1969, Mars orbiter, lancio fallito.
Mariner 8: USA, lancio il 8/5/1971, Mars orbiter, lancio fallito.
Kosmos 419: USSR, lancio il 10/5/1971, Mars lander, raggiunta solamente l’orbita Terrestre.
Mars 2: USSR, lancio il 19/19/1971, Mars orbiter/lander, arrivato il 27/11/71 ma nessun dato utile ricevuto, il lander è bruciato per un ingresso in atmosfera troppo ripido.
Mars 3: USSR, lancio il 28/5/1971, Mars orbiter/lander, arrivato il 3/12/71, il lander ha operato sulla superficie per 20 secondi prima di guastarsi
Mariner 9: USA, lancio il 30/5/1971, Mars orbiter, ha operato in orbita dal 13/11/71 al 27/10/72, inviando 7329 foto.
Mars 4: USSR, lancio il 21/7/1973, Mars orbiter, mancata immissione in orbita il 10/2/74, ha superato il Pianeta.
Mars 5: USSR, lancio il 25/7/1973, Mars orbiter, arrivato il 12/2/74, ha operato solo per alcuni giorni.
Mars 6: USSR, lancio il 5/8/1973, Mars flyby module and lander, arrivato il 12/3/74, il lander si è guastato a causa di un atterraggio troppo violento.
Mars 7: USSR, lancio il 9/8/1973, Mars flyby module and lander, arrivato il 9/3/74, il lander ha mancato il Pianeta.
Viking 1: USA, lancio il 20/8/1975, Mars orbiter/lander, in orbita dal 19/6/76 al 1980, il lander dal 20/7/76 al 1982
Viking 2: USA, lancio il 9/9/1975, Mars orbiter/lander, in orbita dal 7/8/76 al 1987, lander dal 3/9/76 al 1980; insieme I due orbiter e lander Viking hanno inviato a Terra più di 50000 foto.
Phobos 1: USSR, lancio il 7/7/1988, Mars orbiter and Phobos lander, andato perduto nell'Agosto 1988 durante il viaggio verso Marte.
Phobos 2: USSR, lancio il 12/7/1988, Mars orbiter and Phobos lander, andato perduto nel Marzo 1989 vicino Phobos.
Mars Observer: USA, lancio il 25/9/1992, Mars orbiter, andato perduto appena prima dell'arrivo su Marte nel 21/8/1993
Mars Global Surveyor: USA, lancio il 7/11/96, Mars orbiter, arrivato il 12/9/1997, mappatura HD fino al Gennaio 2000, terza estensione di missione completata nel Settembre 2006, ultima comunicazione il 2/11/2006
Mars 96: Russia, lancio il 16/1/1996, orbiter/2 lander/2 penetratori, fallimento al veicolo di lancio.
Mars Pathfinder: USA, lancio il 4/12/1996, Mars lander/rover, atterrato il 4/7/97, completata la prima missione ed iniziata la missione estesa 3/8/97. Ultima comunicazione 27/9/97
Nozomi: Giappone, lancio il 7/4/1998, Mars orbiter, fallito l'ingresso in orbita nel Dicembre 2003
Mars Climate Orbiter: USA, lancio il 11/12/1998, andato perduto all'arrivo il 23/9/99
Mars Polar Lander/Deep Space 2: USA, lancio il 3/1/1999,lander/2 penetratori, andato perduto all'arrivo il 3/12/99
Mars Odyssey: USA, lancio il 7/3/2001, Mars orbiter, arrivato il 24/10/01, completata la prima missione il 25/8/2004, attualmente è in corso la missione estesa per attività scientifiche e relay dati.
Mars Express/Beagle 2: ESA, lancio il 2/6/2003,Mars orbiter/lander, l'orbiter ha completato la prima missione nel Novembre 2005, è attualmente in corso la missione estesa; il lander è andato perso all'arrivo il 25/12/2003
Mars Exploration Rover Spirit: USA, lancio il 10/6/2003, Mars rover, atterrato il 4/1/2004 all'interno del cratere Gusev, completate la missione principale e svariate estensioni, ultima comunicazione il 22/3/2010
Mars Exploration Rover Opportunity: USA, lancio il 7/7/2003, Mars rover, atterrato il 25/1/2004 nella regione Meridiani Planum, completate la missione principale e svariate estensioni, attualmente operativo per una nuova missione estesa.
Mars Reconnaissance Orbiter: USA, lancio il 12/8/2005, Mars orbiter, arrivato il 12/3/06, completata la missione primaria il 26/9/2010, attualmente in missione estesa per attività scientifiche e relay dati.
Phoenix Mars Lander: USA, lancio il 4/8/2007, Mars lander, atterrato il 25/5/2008, completata la missione primaria ed iniziata la missione estesa il 26/8/2008, ultima comunicazione il 2/11/2008
Phobos-Grunt: Russia, lancio il 8/11/2011, Phobos lander e sample return, raggiunta solamente l'orbita Terrestre.
Mars Science Laboratory Curiosity (la curiosity): USA, lancio il 26/11/2011, rover, in arrivo sul cratere Gale il 6 Agosto 2012.
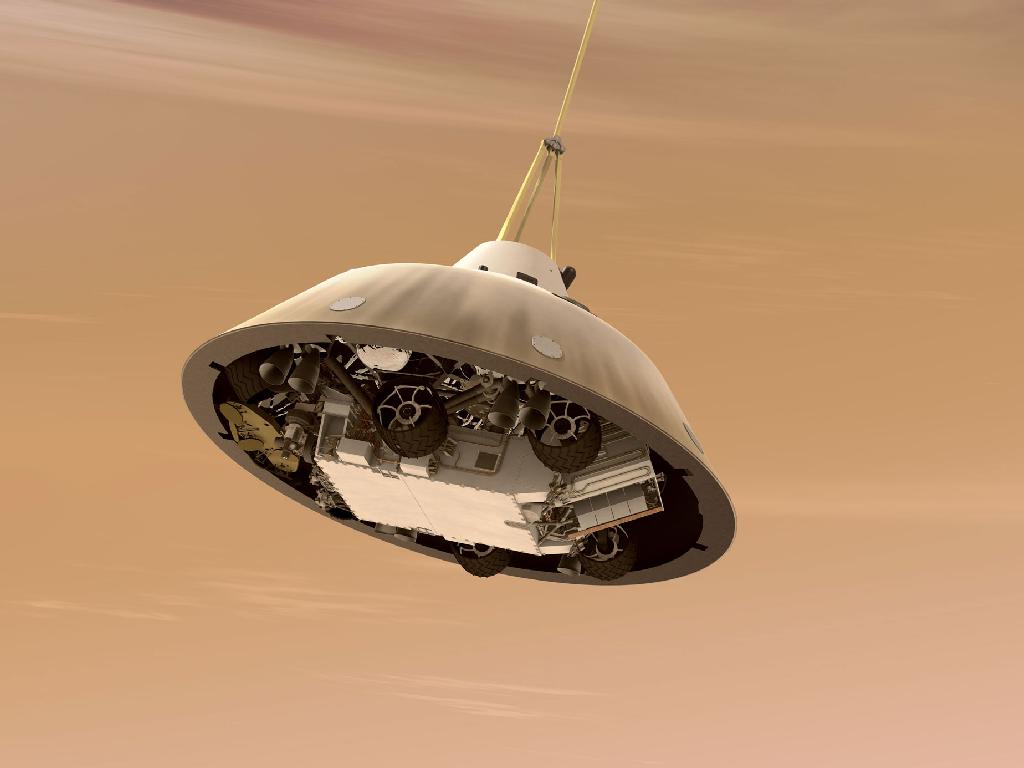
Non è un disco volante! è il nuovo sistema di discesa (SOFT)
Per quanto riguarda le differenze con i suoi predecessori, direi di incominciare ad analizzare , il nuovo sistema di discesa , definito SOFT , che se certificato, con il successo della missione , sarà il precursore di un sistema che permetterà un giorno lo sbarco Umano.
I problemi da risolvere consistevano, nel far atterrare un carico definito pesante sulla superficie Marziana, in quanto il nuovo Rover, batte tutti i record di peso mai inviati sul Pianeta Rosso, per dare un idea precisa di quello che si tenterà per la prima volta di fare, vi proponiamo un video da poco rilasciato dalla Nasa, che spiega nei particolari il tutto, denominato Curiosity's Seven Minutes of Terror:
Novità ingegneristiche e strumentali
Curiosity presenta delle ruote molto più grandi e un nuovo sistema di movimentazione delle stesse, che permette maggiore precisione, ma soprattutto la possibilità di oltrepassare vincoli maggiori, ma la differenza sostanziale sta nel cuore del sistema di alimentazione, con questa nuova unità vengono abbandonati definitivamente i pannelli Solari, e l'alimentazione viene affidata esclusivamente a una super batteria ‘nucleare’ o meglio un RTG (Radioisotope Thermoelectric Generator).
contenente circa 5 kg di diossido di plutonio 238, Il Pu-238.
La strumentazione di Curiosity e' tutta di nuova generazione e comprende un set di strumenti : fotocamere, spettrometri , rivelatori di radiazioni, sensori ambientali ed atmosferici.
Fotocamere (Mast Camere e Mardi)

Le 2 “Mast Camera” o “Mastcam” di Mars Science Laboratory riprenderanno il terreno marziano con scatti a colori, ad alta e bassa risoluzione, e video (10 fps) ad alta definizione. Sono dotate di filtri monocromatici multipli intercambiabili (con un meccanismo a rotazione), adatti ad analizzare l’assorbimento della luce nelle diverse porzioni dello spettro elettromagnetico, nonché di una memoria abbastanza capiente da immagazzinare migliaia di immagini.
Mardi
MARDI è una speciale fotocamera, puntata verso il basso, che sarà attivata durante le fasi finali della discesa di Curiosity verso il pianeta rosso. Il suo compito è stabilire la posizione di detriti, massi e altre caratteristiche del terreno, e questi dati saranno di vitale importanza per la pianificazione del percorso di esplorazione dopo che il Mars Science Laboratory sarà atterrato. MARDI entrerà in azione non appena verrà espulso lo scudo termico.
Microscopio (MAHLI)
MAHLI (acronimo di MARS HAND LENS IMAGER) è un microscopio che fornirà agli scienziati una vista ingrandita di minerali, conformazione e strutture delle rocce marziane, e dello strato superficiale di polvere e detriti rocciosi. L’autofocus, di circa 4 centimetri di larghezza (1,5 pollici), consentirà alla fotocamera integrata di scattare immagini a colori di particolari fino a 12,5 micrometri, cioé più piccoli del diametro di un capello umano.
MAHLI é equipaggiata con una fonte di luce bianca, simile a quella di una torcia elettrica, e con una fonte di luce ultravioletta, simile a quelle delle lampade abbronzanti, per consentire la ripresa delle immagini sia di giorno che di notte. In particolare, la luce ultravioletta sarà utilizzata per indurre fluorescenza che permetterà di rilevare carbonato ed evaporiti, entrambi i quali confermerebbero il ruolo determinante dell’acqua nel plasmare il paesaggio su Marte. Obiettivo principale di MAHLI sarà quello di aiutare il team scientifico a comprendere la storia geologica del sito di atterraggio di MSL su Marte, e sarà fondamentale per selezionare i campioni da impiegare in ulteriori indagini.
Spettrometri (APXS, CHEMCAM, CHEMIN E SAM)
APXS

L’Alpha Particle X-Ray Spectrometer misurerà l’abbondanza degli elementi chimici nelle rocce e nei terreni.
Finanziato dall’Agenzia Spaziale Canadese, APXS sarà messo a contatto con campioni di roccia e di terreno marziani, che verranno esposti a un flusso di particelle alfa e raggi X ottenuti dal decadimento del Curio contenuto nel cuore di questo strumento.
I raggi X sono un tipo di radiazione elettromagnetica, come la luce e microonde. Le particelle alfa sono nuclei di elio, composte da 2 protoni e 2 neutroni. Quando i raggi X e particelle alfa interagiscono con gli atomi del materiale di superficie, spingono gli elettroni fuori dalle loro orbite, producendo un rilascio di energia sotto forma di emissione di raggi X che possono essere misurati con rivelatori. Le energie di questi raggi X consentiranno agli scienziati l’identificazione degli elementi costituenti le rocce.
La “testa” del sensore APXS conterrà un rivelatore altamente sensibile di raggi X. Quanto più lo strumento sarà tenuto in posizione sulla superficie di un campione di roccia o di terreno, tanto più chiaramente si potranno determinare gli elementi chimici che costituiscono il campione stesso. La scansione “completa”, che rivelerà tutti i componenti dei campioni, richiederà due o tre ore, ma APXS può effettuare anche un’esame “rapido”, della durata di una decina di minuti, tramite il quale sarà possibile rilevare i costituenti principali.
L’ APXS è progettato per lavorare in concerto con gli altri sul braccio robotico e nel corpo del Mars Science Laboratory, tra i quali anche lo strumento Chemin e il Dust Removal Tool (pennello/spazzola).
Analizzando la composizione elementare delle rocce e dei terreni, gli scienziati cercheranno di capire come le roccie si sono formate e se sono state ulteriormente modificate da vento, acqua o ghiaccio.
Le versioni precedenti dello strumento APXS, imbarcate sui Mars Exploration Rovers (Spirit e Opportunity) hanno già fornito le prove che l’acqua ha svolto un ruolo importante nel passato geologico di Marte. Due precedenti missioni su Marte montavano a bordo le versioni precedenti di Alpha Particle X-Ray Spectrometer. Il primo è stato l’ Alpha Proton X-Ray Spectrometer , lanciato per la missione Mars Pathfinder nel 1996; il secondo é stato APXS , a bordo di entrambi i Mars Exploration Rovers che sono arrivati sul pianeta rosso nel mese di gennaio 2004.
CHEMCAM
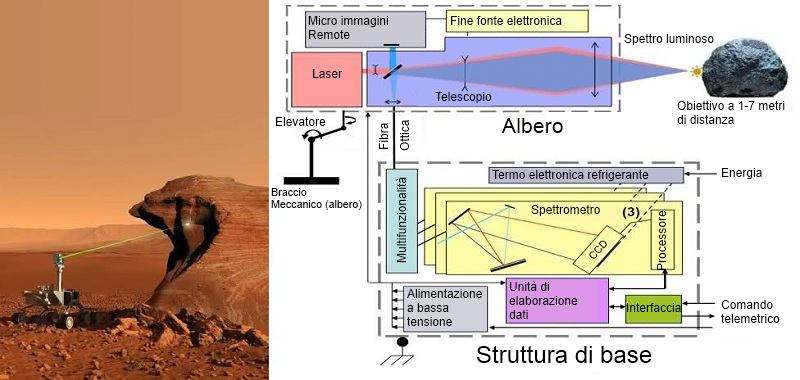
CHEMCAM (Chemistry and Camera) è uno strumento scientifico composto da un laser, un telescopio ed un analizzatore di spettro in grado di studiare le rocce che si trovano ad altezze superiori a 9 metri, fuori dalla portata degli altri strumenti di Curiosity.
CHEMCAM produrrà un raggio laser in grado di vaporizzare le rocce anche di 1mm di area e di analizzare la composizione chimica dei frammenti liberati sotto forma di plasma.
Da 7 metri di distanza, ChemCam sarà in grado di:
Identificare rapidamente il tipo di roccia (ad esempio, se è vulcanica o sedimentaria);
Determinare la composizione dei suoli e dei ciottoli;
misurare l’abbondanza di tutti gli elementi chimici;
riconoscere ghiaccio e minerali con molecole di acqua nelle loro strutture cristalline;
misurare la profondità d’azione degli agenti atmosferici sulle rocce, e fornire l’assistenza visiva durante la perforazione delle stesse.
Il CHEMCAM è montato sul “palo” principale del robot, e può essere inclinato o ruotato come necessario per ottenere una visione ottimale della roccia.
La luce generata dal plasma verrà raccolta dal telescopio e sarà trasmessa lungo un collegamento in fibra ottica fino all’interno del rover, dove sarà divisa nelle sue lunghezze d’onda costituenti e inviata a tre spettrografi che condurranno un’accurata analisi chimica.
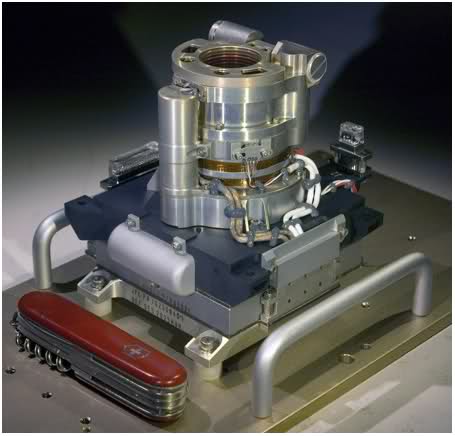
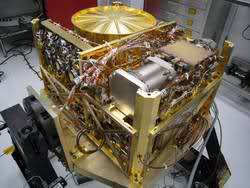
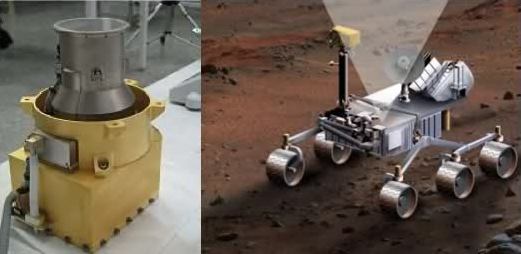
CHEMIN
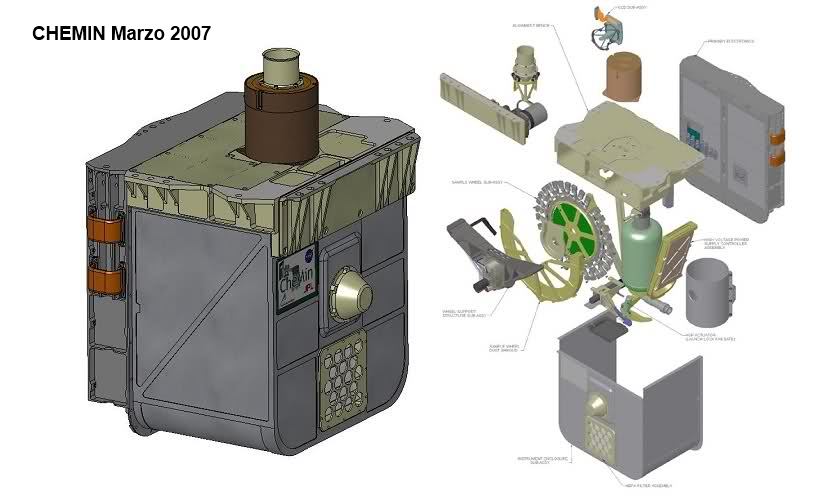
CHEMIN (Chemistry & Mineralogy) è un apparato delle dimensioni di un computer portatile dedicato all’individuazione e alla misura delle abbondanze dei minerali su Marte.
Una "ruota rotante" al centro del corpo rettangolare dello strumento porterà roccia e campioni di suolo al suo interno, dove avverrà un’analisi chimica.
I minerali sono indicativi delle condizioni ambientali che esistevano quando le roccie si sono formate. Ad esempio, olivina e pirosseno, due minerali primari del basalto, si formano quando la lava si solidifica. La Jarosite, che si trova nelle rocce sedimentarie analizzate dal rover Opportunity della NASA su Marte, é un precipitato che si forma in presenza di acqua. CHEMIN saprà distinguere tra gesso, che contiene calcio, zolfo, e acqua, dall’anidrite che è un minerale di calcio e zolfo ma senza acqua nella sua struttura cristallina.
Per preparare i campioni di roccia per l’analisi, il rover perforerà le rocce e raccoglierà la polvere risultante, che verrà setacciata e consegnata a un porta-campioni. CHEMIN colpirà le polveri raccolte con un fascio di raggi X sottile come un capello umano. Quando il fascio di raggi X interagirà con il campione, alcuni dei raggi X saranno assorbiti dagli atomi del campione, che “brilleranno” con una fluorescenza tipica delle loro caratteristiche fisiche.
Inoltre, tramite la tecnica della diffrazione di raggi X, alcuni raggi rimbalzeranno sulle strutture cristalline con un angolo distintivo della struttura cristallina stessa contenuta nel campione. Ad esempio, se il salgemma (comune sale da tavola, o NaCl), venisse stato collocato in CHEMIN, lo strumento produrrebbe un pattern di diffrazione che identifica univocamente tale molecola.
SAM
SAM (Sample Analisys at Mars) è un massiccio strumento scientifico che occupa metà del payload scientifico del rover.
E’ composto da un gascromatografo, uno spettrometro di massa e uno spettrometro laser, tutti strumenti che si trovano abitualmente in un laboratorio di biologia e che infatti analizzeranno automaticamente i campioni di suolo marziano che il rover estrarrà dal terreno alla ricerca di elementi e molecole tipicamente associate alla presenza di organismi viventi (idealmente simili a quelli terrestri). SAM è in grado di “fiutare” infatti varie molecole dove sono presenti carbonio (ad es. il metano), idrogeno, ossigeno e azoto.
Rivelatori di radiazione (RAD E DAN)
RAD
RAD (Radiation Assessment Detector), uno strumento che ha all’incirca le dimensioni di un tostapane, è un rivelatore di radiazioni che guarderà verso il cielo, costituito da rivelatori al silicio e di un cristallo di ioduro di cesio per misurare i raggi cosmici galattici e le particelle solari che passano attraverso l’atmosfera marziana.
RAD non si limiterà a raccogliere dati sulle radiazioni provenienti dallo spazio, ma anche la radiazione secondaria prodotta dall’interazione dei raggi cosmici con l’atmosfera marziana, con le rocce superficiali ed il terreno. In questo modo si potranno valutare i rischi connessi alla futura esplorazione o colonizzazione umana del pianeta, nonché la possibilità di uno sviluppo microbico locale.
Una pila di sottili rivelatori al silicio e un piccolo blocco di cesio ioduro permetteranno di misurare le particelle cariche ad alta energia provenienti attraverso l’atmosfera marziana. Le particelle che passeranno attraverso i rivelatori perdono energia producendo impulsi di elettroni o luce. Un processore di segnale analizzerà tali impulsi per identificare e misurare l’energia di ciascuna particella.
Oltre ai neutroni che identificano raggi gamma, protoni e particelle alfa (composte da 2 protoni e 2 neutroni, identici a nuclei di elio), RAD identificherà ioni pesanti fino al ferro nella tavola periodica. Il RAD sarà leggero e ad alta efficienza energetica in modo da utilizzare al minimo le risorse energetiche del rover.
DAN
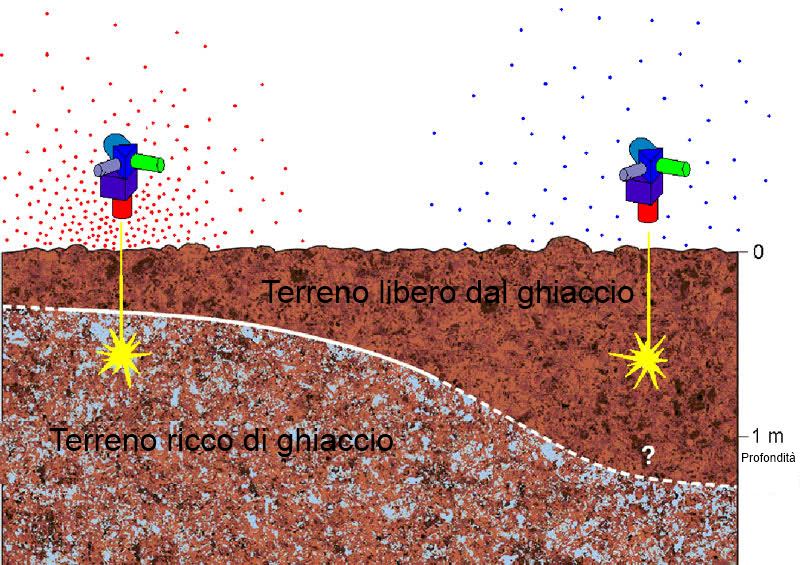
DAN (Dynamic Albedo of Neutrons) è uno strumento in grado di rilevare l’abbondanza e la profondità nel terreno di composti contenenti H e OH (idrogeno e ossigeno-idrogeno).
Attraverso l’uso fasci di neutroni che vengono “sparati” nel sottosuolo marziano. Lo studio dei tempi di “ritorno” di tali fasci consentiranno di accertare quantitativamente e qualitativamente l’eventuale presenza di acqua e idrogeno.
Sensori ambientali/atmosferici (REMS, MEDLI)
REMS
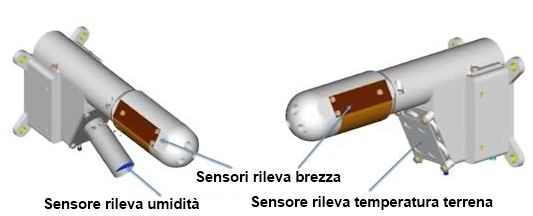
REMS (Rover Environmental Monitoring Station) è la stazione di monitoraggio ambientale del rover Curiosity, e servirà a rilevare la pressione atmosferica, l'umidità, le correnti d’aria, e la radiazione ultravioletta provenienti dal Sole.
Due bracci di piccole dimensioni montati sul palo di sostegno per le telecamere del rover registreranno le componenti orizzontali e verticali della velocità del vento che caratterizzano il flusso d’aria in prossimità della superficie marziana.
Spesso spazzata da brezze, mulinelli di polvere e tempeste di sabbia. Un altro sensore sarà esposto all’atmosfera attraverso una piccola apertura, e servirà a misurare le variazioni di pressione causate da diversi eventi meteorologici quali vortici di polvere, le “maree” atmosferiche e l’arrivo di fronti freddi o caldi. Un filtro farà da scudo contro la contaminazione del sensore dalla polvere.
Ancora, una serie di sensori infrarossi su uno dei bracci (boom 1) misureranno l’intensità della radiazione infrarossa emessa dal suolo, ossia la temperatura del terreno, mentre sul secondo braccio (boom 2) un secondo gruppo di strumenti si occuperà dell’umidità atmosferica. Su entrambi i bracci sono presenti sensori termometrici.
MEDLI
MEDLI (MSL Entry, Descent and Landing Instrumentation) è composto di due famiglie di sensori installati in 14 postazioni sul lato interno dello scudo termico. Il loro compito è di rilevare, in fase di atterraggio, le temperature e pressioni sviluppate durante la rischiosa manovra. I dati raccolti saranno estremamente utili per le future missioni su Marte, perché consentiranno di progettare scudi termici sempre più prestazionali e sempre meno pesanti.
I due tipi di strumenti sono MISP e MEADS
MISP (Medli Spine sensore integrato)
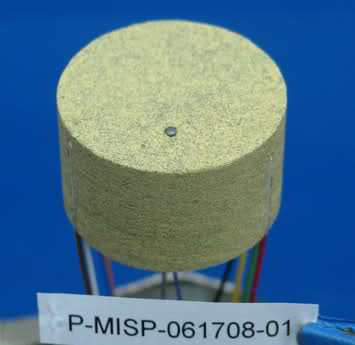
Durante l’ingresso del modulo di discesa di MSL nell’atmosfera marziana, MISP misurerà la temperatura del materiale dello scudo termico in tutto il suo spessore.
I livelli di riscaldamento previsti sono circa tre volte superiori a quelli rilevati sullo scudo dello Space Shuttle, quando questo entra nell’atmosfera terrestre.
Il calore è così alto che il sistema di protezione termica della navicella (TPS) è stato progettato per bruciare (in modo controllato, s’intende) durante la discesa. MISP misurerà la velocità di tale combustione, anche noto come “recessione”. Quando gli ingegneri hanno progettato lo scudo termico, hanno calcolato un preciso tasso di riscaldamento in funzione del tempo di discesa. Tali previsioni saranno confrontate con i dati effettivi raccolti da MISP, aiutando a comprendere quanto materiale ablativo sarà effettivamente necessario per proteggere le future missioni su Marte.
MEADS (Entry Mars Atmospheric Data System)
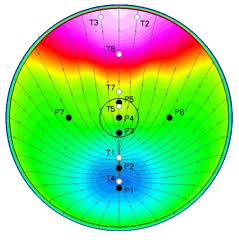
MEADS misurerà la pressione esercitata sullo scudo termico durante l’entrata e la discesa di Curiosity nell’atmosfera di Marte. I sensori di MEADS sono collocati in sette precise posizioni sullo scudo, con una forma che ricorda una croce.
Questo schema di posizionamento consentirà ai tecnici di determinare l’orientamento della sonda (la sua posizione e le oscillazioni della medesima) in funzione del tempo. Gli ingegneri utilizzeranno queste informazioni per confrontare i loro modelli predittivi con la traiettoria reale.
Incrociando le dita, e augurando la massima fortuna possibile e inimmaginabile, per la buona riuscita della missione, speriamo che Curiosity riesca a portare nuovi tasselli, per una maggiore comprensione del Cosmo infinito , e chissà, magari trovare tracce di vita EXTRATERRESTRE presente o passata ....











")










